

Roboterpositionierung
Im Überblick
Robotik und Automatisierung halten bei immer mehr Zuführungs- und Ablageaufgaben Einzug. Mit unserem Spektrum an 2D und 3D Softwarepaketen, sowie der passenden Hardware für die jeweiligen Aufgaben, bieten wir ein ideales Gesamtpaket für ihre Detektionsaufgaben.
Ein markantes Highlight aller Produkte ist die wizardbasierte Führung beim Einrichten und Aufsetzen der Systeme.
Abgerundet mit der klaren Nutzerführung beim Einrichten neuer Produkte erlaubt es unseren Kunden, das System selbstständig aufzusetzen und auch zu warten!
Anwendungen
- Bestückung von Fertigungsautomaten
- Pick and Place Entnahme von Feedern oder Förderbändern
- Objektablage an der richtigen Stelle
- Palettieren und Depalettieren von Produkten
Zusätzlicher Vorteil!
Lokalisieren und Greifen von beliebigen Teilelagen.
Produktübersicht Objektdetektion
X.Lite ProLoc 2D

| Positionserkennung | X/Y Rotation oben/unten |
| Lageebene | bekannt / fix |
| Verkippung | bekannt / keine |
| Vereinzelung | vereinzelt |
Find 3D

| Positionserkennung | X/Y/Z - 3 Rotationsgrade |
| Lageebene | beliebig im Bildfeld |
| Verkippung | 360° in alle Dimensionen |
| Vereinzelung | können auch übereinander liegen |
Control 3D

| Positionserkennung | X/Y/Z - 3 Rotation & Bahnplanung |
| Lageebene | beliebig im Bildfeld |
| Verkippung | 360° in alle Dimensionen |
| Vereinzelung | können auch übereinander liegen |
Für die Bahnplanung kann die Umgebung eingelernt werden und das System berechnet den Fahrweg zur Ablageposition.
Unsere Eigenentwicklung
X. Lite ProLoc 2D

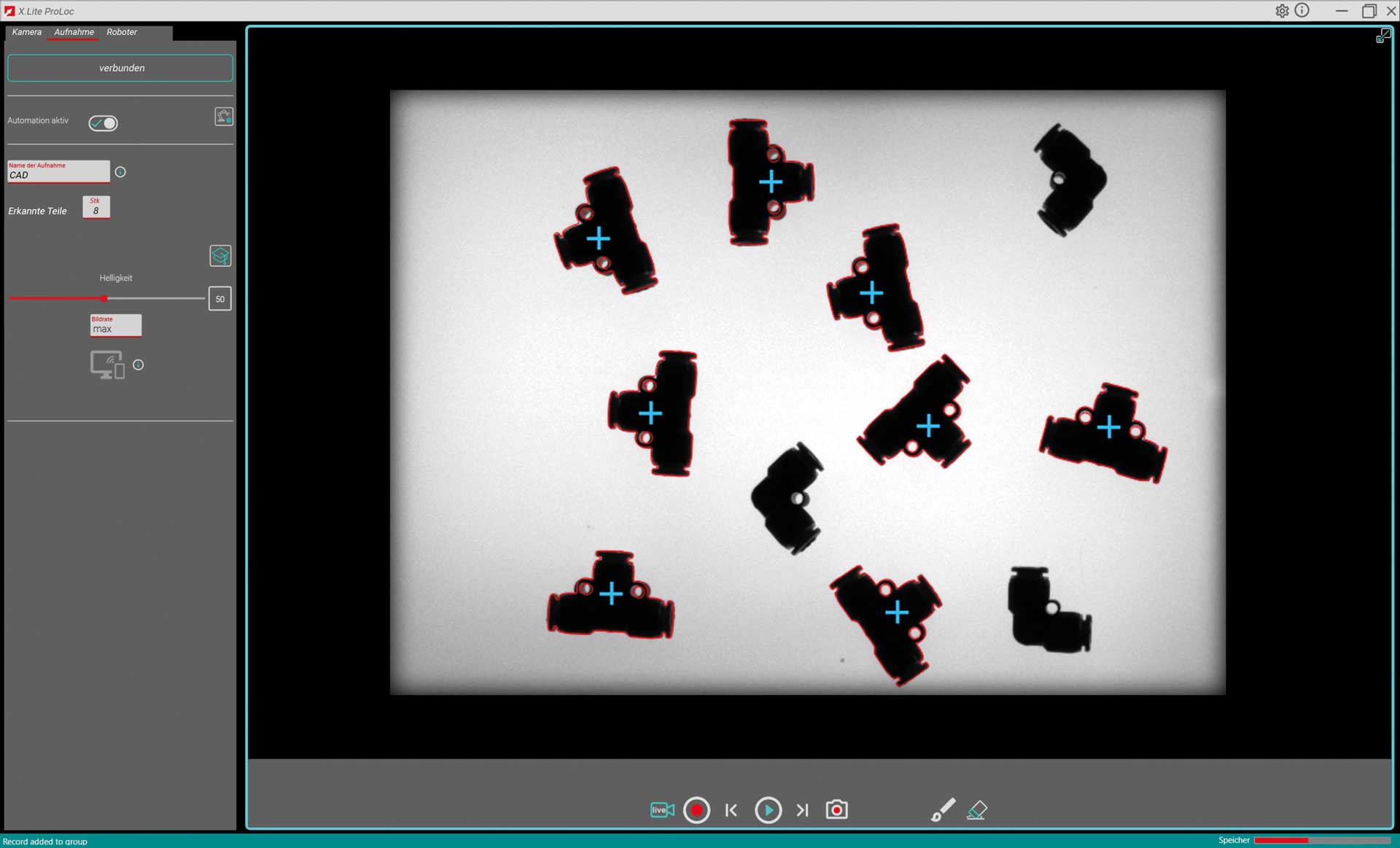
ProLoc 2D ist eine speziell optimierte Software zur Objektdetektion in der 2D Technik. Die Konzentration auf den wesentlichen Funktionsumfang machen ProLoc 2D zu einer rasch integrierbaren, flexiblen und funktionsfähigen Lösung für anspruchsvolle Aufgaben.
Die 2D Technik ist bewährt bei Aufgaben mit definierter Lageebene und bietet eine robuste Erfassung der Objekte im Auf- oder Durchlicht.
Im Fokus stehen intuitive und durchdachte Bedienung. Dadurch wird die Inbetriebnahme, der Betrieb und das Anlernen neuer Teile absolut simpel und effizient. Speziell auf die Bedürfnisse von Roboterapplikationen angepasst, enthält ProLoc 2D viele nützliche und integrierte Hilfsanleitungen und Tools.
Der Benutzer wird Schritt für Schritt zu einem optimalen Anlagenlauf geführt.
Facts
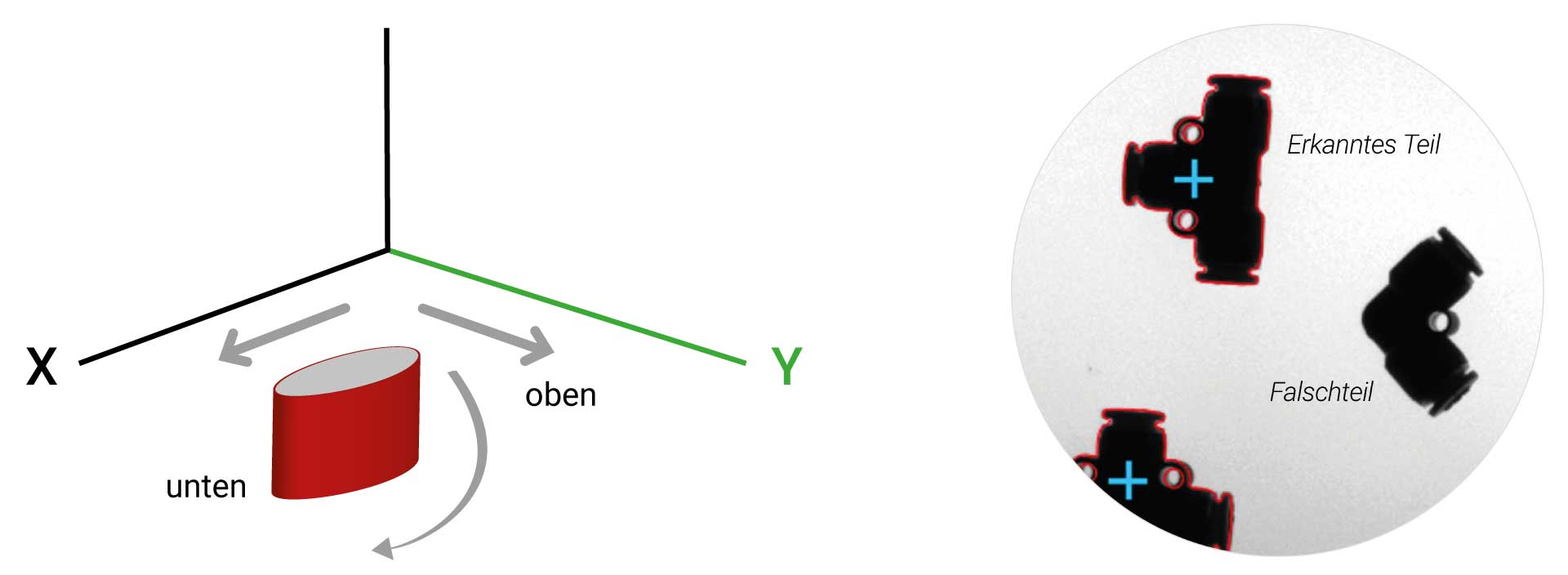
Ausgabe der Daten
- Teilelage in X-Richtung
- Teilelage in Y-Richtung
- Drehlage des Objektes
- Lage des Objektes unten/oben
Funktionen
- Kamerabild einrichten und kontrollieren
- Schnittstellenaufbau zu SPS/Roboter
- Kalibrieren und Gegenprüfen
- Produkte teachen mit Grifftests
- Detektion im Produktionsbetrieb
- Überführen der Bildpunkte in das Roboter-Koordinationssystem
Ideal geeignet
Für Feeder-Zuführanwendungen!
Was kann 2D ermitteln?
Erkannte Teile
Der Objektumriss wird von X.Lite ProLoc erkannt. Vom markierten Schwerpunkt aus wird der Griffpunkt errechnet.
Falschteile
Diese werden anhand der abweichenden Geometrie erkannt. Die Markierung bleibt aus, der Roboter ignoriert es.
Find 3D
Der einfache 3D Positionsgeber
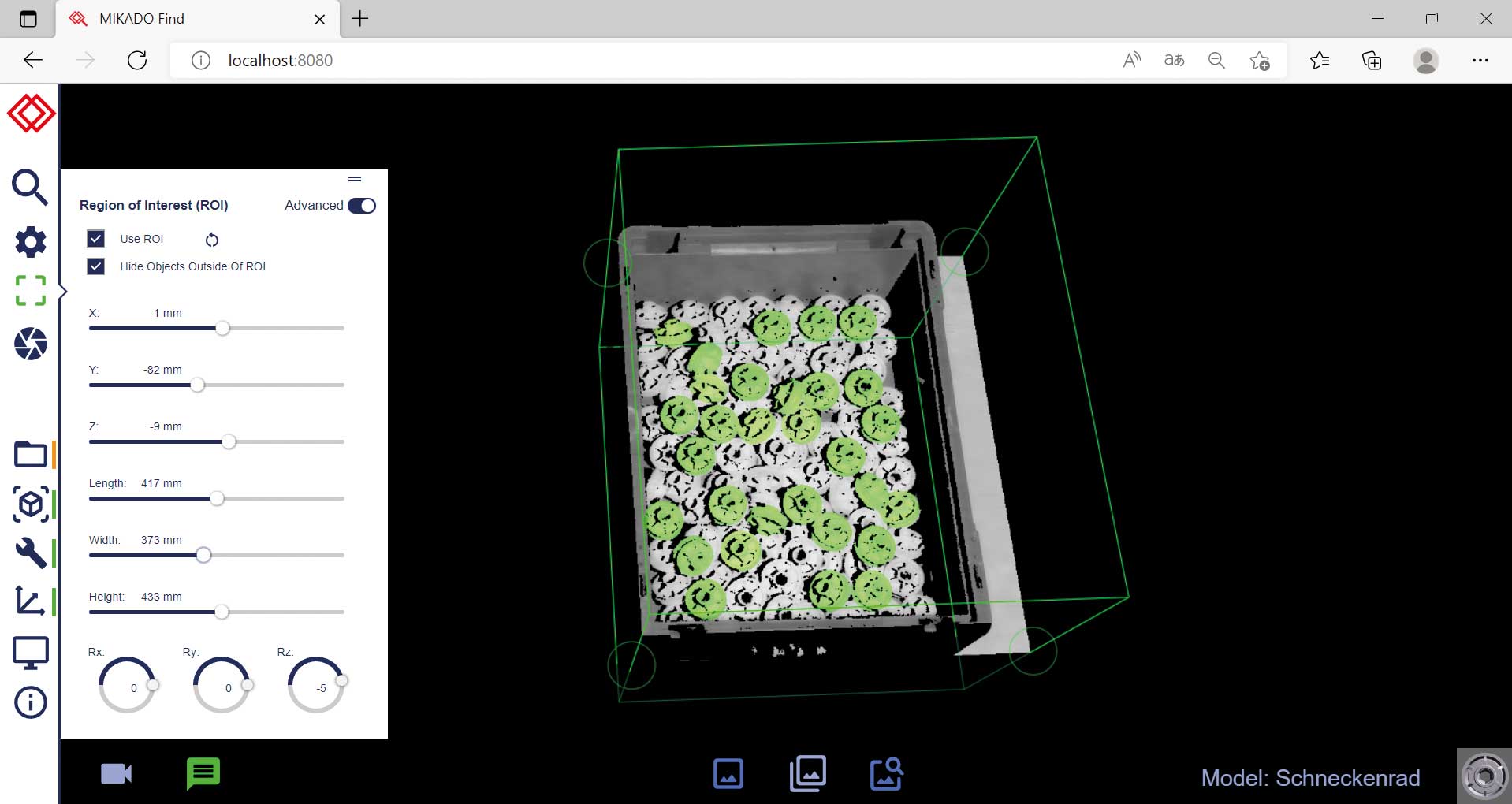
Mit Find 3D bieten wir unseren Kunden eine schlanke Software zur Erkennung von 3D Objekten. Die Punktwolke einer 3D-Kamera wird nach dem CAD-Modell durchsucht. Über die integrierte OPC-UA Schnittstelle werden Position, Orientierung und Matchingscore der gefundenen Teile bereitgestellt.
Die Installation erfolgt einfach auf den Maschinen-PC und die Kommunikation mit den Kameras geschieht über Ethernet.
Die GUI, die grafische Benutzeroberfläche macht die Anwendungssoftware auf einem Rechner bedienbar und ist per Browser zugänglich. GUI kann als Webseite in die Maschinenoberfläche integriert werden, sodass der Bediener sich ausschließlich im bekannten Maschinenuniversum bewegt. Zur Automation bestehen alle Freiheiten in Bewegungs- und Programmablauf.
Das selbsterklärende Kalibrierverfahren macht das Einrichten an der Anlage schnell und einfach möglich.
Facts
Ausgabe der Daten
- Teilelage in X-Richtung
- Teilelage in Y-Richtung
- Teilelage in Z-Richtung
- Drehlage des Objektes in 3 Dimensionen
Funktionen
- Kalibrierung der Kamera auf den Arbeitsbereich oder Robotersystem
- CAD-Daten laden und Suchmodell generieren
- ROI (Region of Interest) festlegen
- Suchparameter individuell konfigurieren
- Ergebnisse anzeigen und ggf. Parameter optimieren
- Ausgabe von Teileposition über Schnittstelle
- Laden/Speichern von Parametern einzelner Produkte
- Vollautomatischer Betrieb inkl. Produktwechsel mittels OPC-UA
Griff in die Kiste
Control 3D


Komplexe Bin Picking Aufgaben ohne Roboterprogrammierung lösen.
Bin Picking, der sogenannte „Griff in die Kiste“, beschreibt das Zusammenspiel von Kamera- und Robotertechnik zum automatisierten Greifen von Teilen. Dabei erkennt eine 3D-Kamera chaotisch angeordnete und beliebig geformte Objekte (Schüttgut) in einer Kiste oder Palette – egal ob es sich um Bleche, Zylinder, Dreh- oder Frästeile, Möbelplatten, Gussteile oder beliebige andere Objekte handelt.
Im Anschluss kann der Roboter die Objekte automatisch entnehmen und lagerichtig an nachfolgende Prozesse übergeben. Den reibungslosen Ablauf all dieser Anwendungen sichert die Kollisionsüberwachung der Bewegungen des Roboters in der gesamten Zelle.
Zusätzliches Feature
Invers Realisierung – Bei diesem umgekehrten Bin Picking wird nicht das zu greifende Objekt, sondern der passende Ablageort gesucht.
Facts
Ausgabe der Daten
- Teilelage in X-Richtung
- Teilelage in Y-Richtung
- Teilelage in Z-Richtung
- Drehlage des Objektes in 3 Dimensionen
- Bahnplanung
Funktionen
- 3D-Aufnahme der Arbeitsumgebung und des Kisteninhalts
- Matching-Algorithmen-Identifikation
- Berechnung des optimalen Griffs für die Teile bei der Entnahme
- Berechnung des Gelenkwinkel unter Berücksichtigung der Arbeitsumgebung
- Kollisionsgeprüfte Bahnplanung
- Sichere und unbeschädigte Entnahme (auch bei unsortierten Teilen)
- Lagerichtiges Ablegen
- Alternative Lösungswege für fehlerfreie Prozessabwicklung
- Kontrollübersicht durch Echtzeit-Visualisierung