Motoren in der Automatisierungstechnik
Servomotoren
- Synchroservomotoren
- Vielzahl an Feedback Varianten
- bis 190Nm Spitzenmoment
- bis 9,4kW Leistung

- Synchroservomotoren
- Vielzahl an Feedback Varianten
- bis 285Nm Spitzenmoment
- bis 67kW Leistung
Download PDF
CAD Daten auf Anfrage

- Synchroservomotoren
- low-cogging Serie
- bis 64Nm Spitzenmoment
- bis 13,7kW Leistung
Download PDF
CAD-Daten auf Anfrage

- EX-Zone II und I
- ATEX 2014/34/EU Richtlinie
- bis 41Nm Spitzenmoment
- bis 6,3kW Leistung
Download PDF
CAD-Daten auf Anfrage
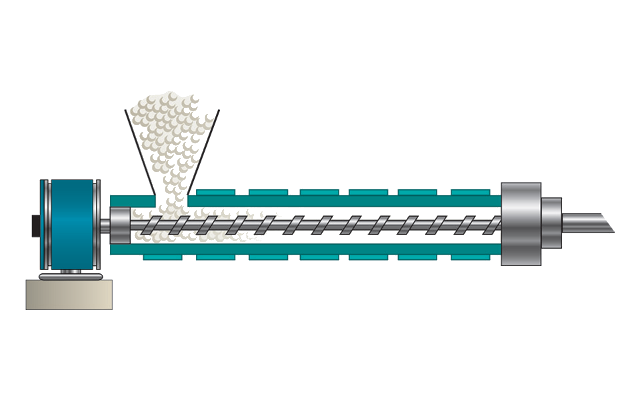
Schematischer Betrieb eines Torquemotors
Da herkömmliche Getriebelösungen vergleichsweise teuer in der Anschaffung sind, stellen Direktantriebslösungen eine wirtschaftliche Alternative dar. Die Torquemotoren von Parker wurden speziell für den Ersatz von herkömmlichen Gleichstrom- und Asynchron-Motor-Getriebe-Lösungen in Extruderanwendungen entwickelt. Grundlage für diese Motoren sind Permanentmagnet-Servomotoren. Durch ihr hohes Drehmoment bei geringer Drehzahl ermöglichen die Torquemotoren kompakte, effiziente, geräuscharme und wartungsfreie Antriebssysteme ohne Getriebe. Durch den Wegfall des Getriebes verbessert sich der Gesamtwirkungsgrad der Anlage, was sich direkt auf den Energieverbrauch auswirkt.
Beispiel: 100 kW Extruder - 7200 Betriebsstunden / Jahr- Energiekosten: 0,15€ / kWh .
Durch den Torquemotor ergibt sich eine Verbesserung des Wirkungsgrads um 5%. Auf diese Weise lassen sich auch bestehende Anlagen optimieren und damit die Nachhaltigkeit auf lange Sicht eindeutig verbessern. Mit Drehmomenten von bis zu 22.100 Nm und Drehzahlen von 50 bis 500 U/min sind die Torquemotoren von Parker die perfekte Alternative zu Getriebesystemen in Extruderanwendungen bis zu 320 kW.
Wissenswertes
Servo- oder Schrittmotor? Die Entscheidungen über die Antriebslösungen hängen von den Anforderungen ab. Schrittmotoren werden im "Open-Loop" (offener Regelkreis) betrieben. Der Motor bewegt sich in Schritten an die vorgegebene Position. Die Regelung geht allerdings davon aus, dass sich der Schrittmotor immer an der richtigen Stelle befindet. Wird der Motor z.B. blockiert, so verliert die Steuerung seine tatsächliche Position. Anders beim Servomotor der mit dem "Closed-Loop" (geschlossener Regelkreis) arbeitet. Dieser ist mit einem Geber ausgestattet der ständig die exakte Position des Rotors an den Regelkreis übermittelt, selbst wenn der Motor blockieren sollte. Dadurch können Servomotoren dynamischer betrieben und ggf. überlastet werden und bilden somit die hochwertigeren Antriebslösungen in der Automatisierungstechnik.

