Der Linearmotor - Dynamik und Präzision
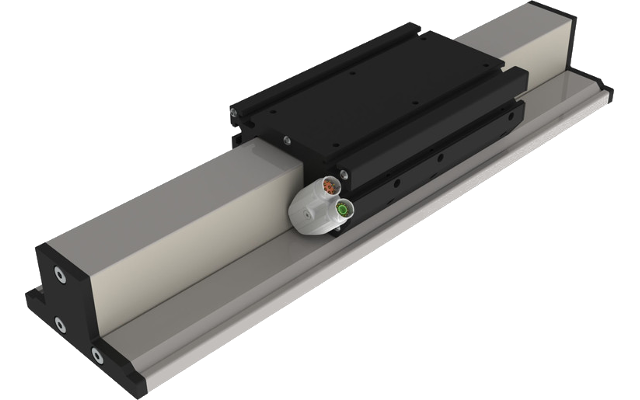
- geführte Schlittenbauform
- Beschleunigung bis 186m/s²
- Spitzenkraft bis 4000N
- Regler unabhängig
- Reinraum ISO3 möglich (MLE2)
Download PDF
CAD Daten auf Anfrage

- Schlittenführung
- Beschleunigung bis zu 71 m/s2
- Maximale Geschwindigkeit: 9 m/s
- Bauformen bis zu 6.000 mm
Download PDF
CAD Daten auf Anfrage
Der Linearmotor einfach erklärt
Ein Linearmotor gehört zum elektrischen Linearantrieb in der Antriebstechnik. Im Gegensatz zu herkömmlichen Motoren erzeugt der Linearmotor keine rotierenden Bewegungen sondern linear in zwei Richtungen. Der Linearmotor basiert auf dem selben Funktionsprinzip wie ein Drehstrommotor, nur sind die beim Drehstrommotor kreisförmig angeordneten elektrischen Erregerwicklungen (Stator) beim Linearmotor auf einer ebenen Strecke angeordnet, d.h. der Drehstrommotor ist also auf die Ebene „abgewickelt“. Der Läufer, der im Drehstrommotor in Rotation versetzt wird, wird beim Linearmotor also von dem längs bewegten Magnetfeld linear über die Fahrstrecke gezogen.
Auf diese Weise kann der Linearmotor gänzlich auf kräfteübertragende Bauteile wie Spindel oder Zahnriemenantrieb verzichten. Durch den Wegfall solcher Komponenten erhöhen sich Dynamik und Wirkungsgrad erheblich und verringern gleichzeitig die Anzahl der Verschleißteile beim Antriebssystem, da lediglich die Linearführungen beansprucht werden.
Wo setzt man einen Linearmotor ein?
- Hohe Dynamik
- Hohe Beschleunigungen
- Hohe Präzision
- Hohe Wiederholgenauigkeit
- Hohe Hublängen
Der Linearmotor im Einsatz
Der Linearmotor besticht mit deiner Konstruktion durch hohe Beschleunigungen, Präzision, Dynamik und Wiederholgenauigkeit (im Messsystem und in der Lineareinheit). Eigenschaften, die in modernen Produktionsanlagen immer mehr an Bedeutung gewinnen. Bedingt durch seinen einfachen Aufbau ermöglicht der Linearmotor Hublängen jenseits der 30m, was ihn für ein breites Spektrum von Anwendungen interessant macht. Betrieben werden Linearmotoren, wie auch Servomotoren, mit sogenannten Servoverstärkern. Hierzu wird ein Steuersignal, welches analog oder digital aufgenommen wird, vom Servoverstärker in ein Motorsignal umgewandelt , das den Linearmotor entsprechend antreibt.
Zu beachten ist, dass durch das Fehlen von mechanischen Komponenten die Selbsthemmung des Antriebes fehlt. Das macht ihn für die Anwendung in der Z-Achse nur für kleine Hubhöhen geeignet.
Die Positionserfassung wird beim Linearmotor, ähnlich wie beim Servomotor, über Geber auf der Achse vorgenommen. Die Palette an Möglichkeiten reicht hier von einfachen Hall-Sensoren bis hin zu Absolutwertgebern mit One-Cable-Technology.
Integration in bestehende Produktionsanlagen
Die Zeiten sind vorbei, in denen ein Linearmotor nicht in bestehende Steuerungssysteme integriert werden konnte. Ihr Steuerungstechniker kann mit seinem gewohnten Feedback arbeiten, da unsere Linearmotoren unabhängig vom Servoregler sind und in nahezu mit allen Steuerungssystemen kompatibel sind. Es können auch auf eine Achse 2 und mehr Linearmotoren verbaut und unterschiedlich angesteuert werden.
Einige unserer Kunden tauschen Linearmotoren beliebig wechselweise mit mechanischen Linearantrieben aus. Es gibt also viele Gründe, künftig einen Linearmotor zu wählen.
Vor- und Nachteile des Linearmotors
Vorteile
- Niedrige Betriebskosten (kein Verschleiß, kaum Wartung)
- Einfache Integration (Baugrößen, Steuerung)
- Hohe Dynamik (Beschleunigungen, Verzögerungen)
- Hohe Wiederholgenauigkeit
- Hohe Präzision
- Hohe Kräfte übertragbar
Nachteile
- In der Z-Achse nur für geringe Hubhöhen geeignet
Sonderbauform: Eisenloser Linearmotor
Eisenlose Linearmotoren bestehen aus einem Schlitten, in dem eine Spule verbaut ist und ein Magnetjoch, in dem sich die Spule bewegt. Da in der Spule kein Eisen verbaut ist, besteht zwischen Spule und Magnetjoch keine Anziehungskraft. Damit wird das Rastmoment (verantwortlich für unruhigen Lauf und Schwankung des Drehmoments) reduziert.
Eisenlose Linearmotoren eignen sich durch geringes Eigengewicht der Spule besonders für sehr dynamische Anwendungen (hohe Beschleunigung und Taktzeiten bei höchster Positioniergenauigkeit). Dauerkräfte von 10 bis 846 Newton und Spitzenkräfte von bis zu 4.200 Newton sind realisierbar. Sie finden Verwendung in:
- Inspektionsachsen
- Halbleiterproduktion
- Ultrapräzisionsachsen
- Medizintechnik, Laborautomation
- Bildschirm-Herstellung
- Optische Industrie

